อะไรเป็นตัวกำหนดความตรงและความโค้งของการเคลื่อนไหวของร่างกาย การเคลื่อนที่เป็นเส้นตรงและวงกลมของจุดวัสดุ
การเคลื่อนไหวทางกล ทฤษฎีสัมพัทธภาพของการเคลื่อนที่ทางกล ระบบอ้างอิง
การเคลื่อนไหวทางกลเป็นที่เข้าใจกันว่าเป็นการเปลี่ยนแปลงเมื่อเวลาผ่านไปในตำแหน่งสัมพัทธ์ของร่างกายหรือส่วนต่าง ๆ ในอวกาศ ตัวอย่างเช่น การเคลื่อนที่ของวัตถุท้องฟ้า การสั่นสะเทือน เปลือกโลก, กระแสลมและน้ำทะเล, การเคลื่อนที่ของเครื่องบินและยานพาหนะ, เครื่องจักรและกลไก, การเสียรูปขององค์ประกอบและโครงสร้างโครงสร้าง, การเคลื่อนที่ของของเหลวและก๊าซ ฯลฯ
ทฤษฎีสัมพัทธภาพของการเคลื่อนที่ทางกล
เราคุ้นเคยกับทฤษฎีสัมพัทธภาพของการเคลื่อนที่ทางกลมาตั้งแต่เด็ก ดังนั้นการนั่งบนรถไฟและดูรถไฟซึ่งเมื่อก่อนยืนอยู่บนรางคู่ขนานแล้วเริ่มเคลื่อนที่ เรามักไม่สามารถระบุได้ว่ารถไฟขบวนใดที่เริ่มเคลื่อนที่จริงๆ และเราควรชี้แจงทันที: เคลื่อนไหวสัมพันธ์กับอะไร? เกี่ยวกับโลกแน่นอน เพราะเราเริ่มเคลื่อนที่โดยสัมพันธ์กับรถไฟข้างเคียง ไม่ว่ารถไฟขบวนไหนจะเริ่มเคลื่อนที่สัมพันธ์กับโลกก็ตาม
ทฤษฎีสัมพัทธภาพของการเคลื่อนที่ทางกลนั้นอยู่ในทฤษฎีสัมพัทธภาพของความเร็วการเคลื่อนที่ของวัตถุ ความเร็วของวัตถุที่สัมพันธ์กับระบบอ้างอิงที่แตกต่างกันจะแตกต่างกัน (ความเร็วของบุคคลที่เคลื่อนที่ในรถไฟ เรือ เครื่องบินจะแตกต่างกันทั้งขนาดและใน ทิศทาง ขึ้นอยู่กับระบบอ้างอิงที่กำหนดความเร็วเหล่านี้: ในหน้าต่างอ้างอิงที่เกี่ยวข้องกับยานพาหนะที่กำลังเคลื่อนที่ หรือกับโลกที่อยู่กับที่)
วิถีการเคลื่อนที่ของร่างกายในระบบอ้างอิงที่ต่างกันก็จะแตกต่างกันเช่นกัน ตัวอย่างเช่น หยดน้ำที่ตกลงบนพื้นในแนวตั้งจะทิ้งร่องรอยไว้เป็นลำธารเฉียงบนหน้าต่างรถไฟที่กำลังเคลื่อนที่ ในทำนองเดียวกัน จุดใดๆ บนใบพัดที่กำลังหมุนของเครื่องบินที่กำลังบินหรือเฮลิคอปเตอร์ที่กำลังตกลงสู่พื้นจะอธิบายถึงวงกลมที่สัมพันธ์กับเครื่องบินและเส้นโค้งที่ซับซ้อนกว่ามาก - เส้นเกลียวที่สัมพันธ์กับโลก ดังนั้นเมื่อ การเคลื่อนไหวทางกลวิถีการเคลื่อนที่ก็สัมพันธ์กันเช่นกัน
เส้นทางที่ร่างกายเดินทางนั้นขึ้นอยู่กับกรอบอ้างอิงด้วย กลับมาที่ผู้โดยสารคนเดิมที่นั่งอยู่บนรถไฟเราเข้าใจว่าเส้นทางที่เขาเดินทางสัมพันธ์กับรถไฟในระหว่างการเดินทางมีค่าเท่ากับศูนย์ (ถ้าเขาไม่ได้เดินไปรอบ ๆ รถม้า) หรือในกรณีใด ๆ ก็น้อยกว่าเส้นทางมาก เขาเดินทางไปพร้อมกับรถไฟสัมพันธ์กับโลก ดังนั้นด้วยการเคลื่อนที่ทางกล เส้นทางจึงสัมพันธ์กันด้วย
การตระหนักถึงสัมพัทธภาพของการเคลื่อนที่ทางกล (กล่าวคือ การเคลื่อนที่ของวัตถุสามารถพิจารณาได้ในระบบอ้างอิงต่างๆ) นำไปสู่การเปลี่ยนจากระบบจุดศูนย์กลางโลกของโลกของปโตเลมี ไปสู่ระบบเฮลิโอเซนตริกของโคเปอร์นิคัส ปโตเลมีตามการเคลื่อนที่ของดวงอาทิตย์และดวงดาวบนท้องฟ้าที่สังเกตมาตั้งแต่สมัยโบราณ ได้วางโลกที่นิ่งไว้ไว้ที่ใจกลางจักรวาลโดยส่วนที่เหลือหมุนรอบโลก เทห์ฟากฟ้า. โคเปอร์นิคัสเชื่อว่าโลกและดาวเคราะห์อื่นๆ หมุนรอบดวงอาทิตย์และในเวลาเดียวกันก็หมุนรอบแกนของพวกมันด้วย
ดังนั้นการเปลี่ยนแปลงในระบบอ้างอิง (โลก - ในระบบ geocentric ของโลกและดวงอาทิตย์ - ในระบบเฮลิโอเซนตริก) นำไปสู่ระบบเฮลิโอเซนทริกที่ก้าวหน้ามากขึ้นซึ่งทำให้สามารถแก้ปัญหาทางวิทยาศาสตร์และประยุกต์ทางดาราศาสตร์มากมาย และเปลี่ยนมุมมองของมนุษยชาติต่อจักรวาล
ระบบพิกัด $X, Y, Z$ เนื้อหาอ้างอิงที่เกี่ยวข้อง และอุปกรณ์สำหรับการวัดเวลา (นาฬิกา) จะสร้างระบบอ้างอิงที่สัมพันธ์กับการเคลื่อนไหวของวัตถุที่พิจารณา

เนื้อหาอ้างอิงเรียกว่าร่างกายสัมพันธ์กับการเปลี่ยนแปลงตำแหน่งของร่างกายอื่นในอวกาศ
สามารถเลือกระบบอ้างอิงได้ตามใจชอบ ในการศึกษาจลนศาสตร์ ระบบอ้างอิงทั้งหมดจะเท่ากัน ในปัญหาไดนามิก คุณสามารถใช้หน้าต่างอ้างอิงที่เคลื่อนที่ตามอำเภอใจก็ได้ แต่หน้าต่างอ้างอิงเฉื่อยจะสะดวกที่สุด เนื่องจากลักษณะของการเคลื่อนที่มีรูปแบบที่ง่ายกว่า
จุดวัสดุ
จุดวัสดุคือวัตถุที่มีขนาดเล็กน้อยและมีมวล
มีการนำแนวคิดเรื่อง "จุดวัสดุ" มาใช้เพื่ออธิบาย (โดยใช้สูตรทางคณิตศาสตร์) การเคลื่อนที่ทางกลของวัตถุ ทำได้เนื่องจากอธิบายการเคลื่อนไหวของจุดได้ง่ายกว่าวัตถุจริง ซึ่งอนุภาคสามารถเคลื่อนที่ด้วยความเร็วที่แตกต่างกันได้ (เช่น ระหว่างการหมุนของร่างกายหรือการเสียรูป)
หากวัตถุจริงถูกแทนที่ด้วยจุดวัสดุมวลของวัตถุนี้จะถูกกำหนดให้กับจุดนี้ แต่ขนาดของมันจะถูกละเลยและในขณะเดียวกันก็มีความแตกต่างในลักษณะการเคลื่อนที่ของจุดของมัน (ความเร็ว, ความเร่ง, ฯลฯ) ถ้ามีก็ละเลย สามารถทำได้ในกรณีใดบ้าง?
วัตถุเกือบทุกชนิดถือได้ว่าเป็นจุดวัสดุหากระยะทางที่จุดต่างๆ ของร่างกายเดินทางนั้นกว้างมากเมื่อเทียบกับขนาดของมัน
ตัวอย่างเช่น โลกและดาวเคราะห์ดวงอื่นๆ ถือเป็นจุดวัตถุเมื่อศึกษาการเคลื่อนที่ของพวกมันรอบดวงอาทิตย์ ในกรณีนี้ ความแตกต่างในการเคลื่อนที่ของจุดต่างๆ ของดาวเคราะห์ใดๆ ที่เกิดจากการหมุนรอบตัวเองในแต่ละวัน จะไม่ส่งผลกระทบต่อปริมาณที่อธิบายการเคลื่อนที่ประจำปี
ดังนั้น หากในการเคลื่อนที่ของวัตถุที่กำลังศึกษาอยู่ เราสามารถละเลยการหมุนของมันรอบแกนได้ วัตถุดังกล่าวก็สามารถแสดงเป็นจุดวัสดุได้
อย่างไรก็ตาม เมื่อแก้ไขปัญหาที่เกี่ยวข้องกับการหมุนรอบตัวเองของดาวเคราะห์ในแต่ละวัน (เช่น เมื่อพิจารณาพระอาทิตย์ขึ้นที่ สถานที่ที่แตกต่างกันพื้นผิว โลก) ไม่มีเหตุผลที่จะถือว่าดาวเคราะห์เป็นจุดวัตถุเนื่องจากผลของปัญหาขึ้นอยู่กับขนาดของดาวเคราะห์ดวงนี้และความเร็วของการเคลื่อนที่ของจุดบนพื้นผิว
การพิจารณาเครื่องบินเป็นจุดสำคัญหากจำเป็นเช่นเพื่อกำหนดความเร็วเฉลี่ยของการเคลื่อนที่ระหว่างทางจากมอสโกวถึงโนโวซีบีสค์เป็นเรื่องถูกต้องตามกฎหมาย แต่เมื่อคำนวณแรงต้านอากาศที่กระทำต่อเครื่องบินที่บินอยู่นั้น ไม่สามารถถือเป็นจุดวัสดุได้ เนื่องจากแรงต้านทานขึ้นอยู่กับขนาดและรูปร่างของเครื่องบิน
หากวัตถุเคลื่อนที่แบบแปลน แม้ว่าขนาดของมันจะเทียบได้กับระยะทางที่มันเคลื่อนที่ วัตถุนี้ก็ถือได้ว่าเป็นจุดวัตถุ (เนื่องจากจุดทั้งหมดของร่างกายเคลื่อนที่ไปในทิศทางเดียวกัน)
โดยสรุปเราสามารถพูดได้ว่า: เนื้อหาซึ่งเป็นมิติที่สามารถละเลยได้ในเงื่อนไขของปัญหาที่พิจารณานั้นถือได้ว่าเป็นจุดสำคัญ
วิถี
วิถีคือเส้น (หรือเส้นโค้ง) ที่วัตถุอธิบายเมื่อเคลื่อนที่สัมพันธ์กับเนื้อหาอ้างอิงที่เลือก
มันสมเหตุสมผลที่จะพูดถึงวิถีเฉพาะในกรณีที่ร่างกายสามารถแสดงเป็นจุดวัตถุได้
วิถีสามารถมีรูปทรงที่แตกต่างกันได้ บางครั้งอาจเป็นไปได้ที่จะตัดสินรูปร่างของวิถีด้วยร่องรอยที่มองเห็นได้จากวัตถุที่กำลังเคลื่อนไหว เช่น เครื่องบินที่กำลังบินหรือดาวตกที่พุ่งผ่านท้องฟ้ายามค่ำคืน
รูปร่างของวิถีจะขึ้นอยู่กับการเลือกตัววัตถุอ้างอิง ตัวอย่างเช่น เมื่อเทียบกับโลก วิถีโคจรของดวงจันทร์เป็นวงกลม เมื่อเทียบกับดวงอาทิตย์ มันเป็นเส้นที่มีรูปร่างซับซ้อนกว่า

เมื่อศึกษาการเคลื่อนที่ทางกล โดยปกติแล้วโลกจะถือเป็นวัตถุอ้างอิง
วิธีการระบุตำแหน่งของจุดและอธิบายการเคลื่อนที่
การระบุตำแหน่งของจุดในอวกาศทำได้สองวิธี: 1) การใช้พิกัด; 2) การใช้เวกเตอร์รัศมี
ตำแหน่งของจุดโดยใช้พิกัดถูกระบุโดยการฉายภาพสามจุดของจุด $x, y, z$ บนแกนของระบบพิกัดคาร์ทีเซียน $OX, OU, OZ$ ที่เกี่ยวข้องกับส่วนอ้างอิง ในการทำเช่นนี้ จากจุด A จำเป็นต้องลดตั้งฉากบนระนาบ $YZ$ (พิกัด $x$), $XXZ$ (พิกัด $y$), $XXУ$ (พิกัด $z$) ตามลำดับ มันเขียนไว้ดังนี้: $A(x, y, z)$ สำหรับกรณีเฉพาะ $(x=6, y=10.2, z= 4.5$) จุด $A$ ถูกกำหนดให้เป็น $A(6; 10; 4.5)$

ในทางตรงกันข้ามหากได้รับค่าเฉพาะของพิกัดของจุดในระบบพิกัดที่กำหนดดังนั้นเพื่อแสดงถึงจุดนั้นจำเป็นต้องพล็อตค่าพิกัดบนแกนที่สอดคล้องกัน ($x$ ถึง $ OX$ ฯลฯ) และสร้างส่วนที่ขนานกันบนส่วนที่ตั้งฉากกันทั้งสามส่วนนี้ จุดยอดซึ่งอยู่ตรงข้ามจุดกำเนิดของพิกัด $O$ และอยู่บนเส้นทแยงมุมของเส้นขนานจะเป็นจุดที่ต้องการ $A$
หากจุดเคลื่อนที่ภายในระนาบใดระนาบหนึ่ง ก็เพียงพอที่จะวาดแกนพิกัดสองแกนผ่านจุดที่เลือกบนเนื้อหาอ้างอิง: $OX$ และ $OU$ จากนั้นตำแหน่งของจุดบนระนาบจะถูกกำหนดโดยพิกัดสองพิกัด $x$ และ $y$

หากจุดเคลื่อนที่ไปตามเส้นตรง ก็เพียงพอที่จะตั้งค่าแกนพิกัด OX หนึ่งแกนและกำหนดทิศทางตามแนวการเคลื่อนที่
การตั้งค่าตำแหน่งของจุด $A$ โดยใช้เวกเตอร์รัศมีจะดำเนินการโดยการเชื่อมต่อจุด $A$ กับจุดกำเนิดของพิกัด $O$ ส่วนที่กำหนดทิศทาง $OA = r↖(→)$ เรียกว่าเวกเตอร์รัศมี
เวกเตอร์รัศมีเป็นเวกเตอร์ที่เชื่อมจุดกำเนิดกับตำแหน่งของจุด ณ เวลาใดเวลาหนึ่งโดยพลการ
จุดถูกระบุโดยเวกเตอร์รัศมีหากทราบความยาว (โมดูลัส) และทิศทางในอวกาศนั่นคือค่าของการฉายภาพ $r_x, r_y, r_z$ บนแกนพิกัด $OX, OY, OZ$ หรือ มุมระหว่างเวกเตอร์รัศมีกับแกนพิกัด สำหรับกรณีการเคลื่อนที่บนเครื่องบิน เรามี:
โดยที่ $r=|r↖(→)|$ คือโมดูลของเวกเตอร์รัศมี $r↖(→), r_x$ และ $r_y$ คือเส้นโครงบนแกนพิกัด โดยทั้งสามปริมาณเป็นสเกลาร์ xzhu - พิกัดของจุด A
สมการสุดท้ายแสดงให้เห็นถึงความเชื่อมโยงระหว่างวิธีพิกัดและเวกเตอร์ในการระบุตำแหน่งของจุด
เวกเตอร์ $r↖(→)$ สามารถแยกย่อยเป็นองค์ประกอบตามแกน $X$ และ $Y$ ได้ กล่าวคือ แสดงเป็นผลรวมของเวกเตอร์สองตัว:
$r↖(→)=r↖(→)_x+r↖(→)_y$
ดังนั้นตำแหน่งของจุดในอวกาศจึงถูกกำหนดโดยพิกัดหรือโดยเวกเตอร์รัศมี
วิธีอธิบายการเคลื่อนที่ของจุด
ตามวิธีการระบุพิกัดการเคลื่อนที่ของจุดสามารถอธิบายได้: 1) โดยวิธีพิกัด; 2) วิธีเวกเตอร์
ด้วยวิธีพิกัดในการอธิบาย (หรือระบุ) การเคลื่อนไหว การเปลี่ยนแปลงพิกัดของจุดในช่วงเวลาหนึ่งจะถูกเขียนในรูปแบบของฟังก์ชันของพิกัดทั้งสามเทียบกับเวลา:
สมการนี้เรียกว่าสมการจลนศาสตร์ของการเคลื่อนที่ของจุด ซึ่งเขียนในรูปแบบพิกัด เมื่อรู้สมการจลนศาสตร์ของการเคลื่อนที่และเงื่อนไขเริ่มต้น (เช่น ตำแหน่งของจุด ณ เวลาเริ่มต้น) คุณสามารถกำหนดตำแหน่งของจุดได้ตลอดเวลา
ด้วยวิธีเวกเตอร์ในการอธิบายการเคลื่อนที่ของจุด การเปลี่ยนแปลงตำแหน่งในช่วงเวลาหนึ่งจะได้รับจากการพึ่งพาเวกเตอร์รัศมีตรงเวลา:
$r↖(→)=r↖(→)(t)$
สมการคือสมการการเคลื่อนที่ของจุดซึ่งเขียนในรูปแบบเวกเตอร์ หากทราบแล้วในช่วงเวลาใดเวลาหนึ่งก็เป็นไปได้ที่จะคำนวณเวกเตอร์รัศมีของจุดเช่น กำหนดตำแหน่งของมัน (เช่นในกรณีของวิธีพิกัด) ดังนั้น การระบุสมการสเกลาร์สามสมการจึงเทียบเท่ากับการระบุสมการเวกเตอร์หนึ่งสมการ
สำหรับการเคลื่อนที่แต่ละกรณี รูปแบบของสมการจะค่อนข้างเฉพาะเจาะจง หากวิถีการเคลื่อนที่ของจุดหนึ่งเป็นเส้นตรง การเคลื่อนไหวนั้นเรียกว่าเส้นตรง และหากเป็นเส้นโค้ง จะเรียกว่าเส้นโค้ง
การเคลื่อนไหวและเส้นทาง
การกระจัดในกลศาสตร์เป็นเวกเตอร์ที่เชื่อมต่อตำแหน่งของจุดที่เคลื่อนที่ที่จุดเริ่มต้นและจุดสิ้นสุดของช่วงระยะเวลาหนึ่ง
แนวคิดของเวกเตอร์การกระจัดถูกนำมาใช้เพื่อแก้ปัญหาจลนศาสตร์ - เพื่อกำหนดตำแหน่งของร่างกาย (จุด) ในอวกาศใน ช่วงเวลานี้เวลาหากทราบตำแหน่งเริ่มต้น
ในรูป เวกเตอร์ $(M_1M_2)↖(-)$ เชื่อมต่อสองตำแหน่งของจุดที่เคลื่อนที่ - $M_1$ และ $M_2$ ณ เวลา $t_1$ และ $t_2$ ตามลำดับ และตามคำจำกัดความแล้ว เป็นเวกเตอร์การกระจัด ถ้าจุด $M_1$ ถูกระบุโดยเวกเตอร์รัศมี $r↖(→)_1$ และจุด $M_2$ ถูกระบุโดยเวกเตอร์รัศมี $r↖(→)_2$ ดังนั้น ดังที่เห็นได้จากรูป เวกเตอร์การกระจัด เท่ากับความแตกต่างเวกเตอร์ทั้งสองนี้ กล่าวคือ การเปลี่ยนแปลงของเวกเตอร์รัศมีเมื่อเวลาผ่านไป $∆t=t_2-t_1$:
$∆r↖(→)=r↖(→)_2-r↖(→)_1$.
การบวกของการกระจัด (เช่น บนส่วนที่ติดกันสองส่วนของวิถี) $∆r↖(→)_1$ และ $∆r↖(→)_2$ จะดำเนินการตามกฎการบวกเวกเตอร์:
$∆r=∆r↖(→)_2+∆r↖(→)_1$
เส้นทางคือความยาวของส่วนวิถีที่เดินทางโดยจุดวัสดุในช่วงเวลาที่กำหนดขนาดของเวกเตอร์การกระจัดในกรณีทั่วไปไม่ใช่ เท่ากับความยาวเส้นทางที่เดินทางโดยจุดในช่วงเวลา $∆t$ (วิถีสามารถเป็นเส้นโค้งได้ และนอกจากนี้ จุดยังสามารถเปลี่ยนทิศทางการเคลื่อนที่ได้)
ขนาดของเวกเตอร์การกระจัดเท่ากับเส้นทางสำหรับการเคลื่อนที่เป็นเส้นตรงในทิศทางเดียวเท่านั้น ถ้าทิศทางของการเคลื่อนที่เชิงเส้นเปลี่ยนแปลง ขนาดของเวกเตอร์การกระจัดจะน้อยกว่าเส้นทาง
ในระหว่างการเคลื่อนที่เชิงโค้ง ขนาดของเวกเตอร์การกระจัดจะน้อยกว่าเส้นทางด้วย เนื่องจากคอร์ดจะน้อยกว่าความยาวของส่วนโค้งที่มันรองรับเสมอ

ความเร็วของจุดวัสดุ
ความเร็วเป็นลักษณะของความเร็วที่การเปลี่ยนแปลงใด ๆ เกิดขึ้นในโลกรอบตัวเรา (การเคลื่อนที่ของสสารในอวกาศและเวลา) การเคลื่อนที่ของคนเดินเท้าไปตามทางเท้า การบินของนก การแพร่กระจายของเสียง คลื่นวิทยุหรือแสงในอากาศ การไหลของน้ำจากท่อ การเคลื่อนที่ของเมฆ การระเหยของน้ำ ความร้อนของ เหล็ก - ปรากฏการณ์ทั้งหมดนี้มีลักษณะเฉพาะด้วยความเร็วที่แน่นอน
ในการเคลื่อนไหวทางกลของร่างกาย ความเร็วไม่เพียงกำหนดลักษณะเฉพาะของความเร็วเท่านั้น แต่ยังรวมถึงทิศทางของการเคลื่อนที่ด้วย เช่น ปริมาณเวกเตอร์
ความเร็ว $υ↖(→)$ ของจุดคือขีดจำกัดของอัตราส่วนของการเคลื่อนที่ $∆r↖(→)$ ต่อช่วงเวลา $∆t$ ในระหว่างที่การเคลื่อนไหวนี้เกิดขึ้น เนื่องจาก $∆t$ มีแนวโน้มที่จะ ศูนย์ (เช่น อนุพันธ์ $∆r↖(→)$ โดย $t$):
$υ↖(→)=(lim)↙(∆t→0)(∆r↖(→))/(∆t)=r↖(→)_1"$
ส่วนประกอบของเวกเตอร์ความเร็วตามแกน $X, Y, Z$ ถูกกำหนดในทำนองเดียวกัน:
$υ↖(→)_x=(lim)↙(∆t→0)(∆x)/(∆t)=x"; υ_y=y"; υ_z=z"$
แนวคิดเรื่องความเร็วที่กำหนดในลักษณะนี้เรียกอีกอย่างว่า ความเร็วทันทีคำจำกัดความของความเร็วนี้ใช้ได้กับการเคลื่อนไหวทุกประเภท - จาก เส้นโค้งไม่สม่ำเสมอถึงสม่ำเสมอสม่ำเสมอ. เมื่อพูดถึงความเร็วระหว่างการเคลื่อนไหวที่ไม่สม่ำเสมอ นั่นหมายถึงความเร็วที่เกิดขึ้นทันที ธรรมชาติของเวกเตอร์ของความเร็วเป็นไปตามคำจำกัดความนี้โดยตรง เนื่องจาก การย้าย- ปริมาณเวกเตอร์ เวกเตอร์ความเร็วชั่วขณะ $υ↖(→)$ นั้นมีทิศทางในแนวสัมผัสกับวิถีการเคลื่อนที่เสมอ มันบ่งบอกถึงทิศทางที่วัตถุจะเคลื่อนไหว หากจากช่วงเวลา $t$ การกระทำของวัตถุอื่นใดบนนั้นหยุดลง

ความเร็วเฉลี่ย
ความเร็วเฉลี่ยของจุดจะถูกป้อนสำหรับคุณลักษณะที่ไม่ การเคลื่อนไหวสม่ำเสมอ(เช่น การเคลื่อนที่ด้วยความเร็วแปรผัน) และมีการกำหนดไว้สองวิธี
1. ความเร็วเฉลี่ยของจุด $υ_(av)$ เท่ากับอัตราส่วนของเส้นทางทั้งหมดที่ $∆s$ ที่เคลื่อนที่ผ่านร่างกายต่อเวลาทั้งหมดที่เคลื่อนที่ $∆t$:
$υ↖(→)_(เฉลี่ย)=(∆s)/(∆t)$
ด้วยคำจำกัดความนี้ ความเร็วเฉลี่ยจะเป็นสเกลาร์ เนื่องจากระยะทางที่เดินทาง (ระยะทาง) และเวลาเป็นปริมาณสเกลาร์
วิธีการกำหนดนี้ให้แนวคิดว่า ความเร็วเฉลี่ยการเคลื่อนที่บนส่วนวิถี (ความเร็วพื้นดินเฉลี่ย)
2. ความเร็วเฉลี่ยของจุดหนึ่งเท่ากับอัตราส่วนการเคลื่อนที่ของจุดต่อระยะเวลาที่เกิดการเคลื่อนไหวนี้:
$υ↖(→)_(เฉลี่ย)=(∆r↖(→))/(∆t)$
ความเร็วเฉลี่ยของการเคลื่อนที่เป็นปริมาณเวกเตอร์
สำหรับการเคลื่อนที่โค้งที่ไม่เท่ากัน คำจำกัดความของความเร็วเฉลี่ยไม่ได้ทำให้สามารถระบุความเร็วจริงโดยประมาณตลอดเส้นทางการเคลื่อนที่ของจุดได้เสมอไป ตัวอย่างเช่น หากจุดหนึ่งเคลื่อนที่ไปตามเส้นทางปิดเป็นระยะเวลาหนึ่ง การกระจัดจะเท่ากับศูนย์ (แต่ความเร็วแตกต่างจากศูนย์อย่างชัดเจน) ในกรณีนี้ ควรใช้คำจำกัดความแรกของความเร็วเฉลี่ย
ไม่ว่าในกรณีใด คุณควรแยกความแตกต่างระหว่างคำจำกัดความของความเร็วเฉลี่ยทั้งสองนี้ และรู้ว่าคุณกำลังพูดถึงคำใด

กฎการเพิ่มความเร็ว
กฎการบวกความเร็วจะสร้างความสัมพันธ์ระหว่างค่าความเร็วของจุดวัสดุที่สัมพันธ์กับ ระบบต่างๆจุดอ้างอิงเคลื่อนที่สัมพันธ์กัน ในฟิสิกส์ที่ไม่สัมพันธ์กัน (คลาสสิก) เมื่อความเร็วที่พิจารณามีขนาดเล็กเมื่อเทียบกับความเร็วแสง กฎการบวกความเร็วของกาลิเลโอนั้นใช้ได้ ซึ่งแสดงโดยสูตร:
$υ↖(→)_2=υ↖(→)_1+υ↖(→)$
โดยที่ $υ↖(→)_2$ และ $υ↖(→)_1$ เป็นความเร็วของร่างกาย (จุด) สัมพันธ์กับสอง ระบบเฉื่อยการอ้างอิง - ระบบอ้างอิงแบบคงที่ $K_2$ และระบบอ้างอิง $K_1$ เคลื่อนที่ด้วยความเร็ว $υ↖(→)$ สัมพันธ์กับ $K_2$
สามารถหาสูตรได้โดยการเพิ่มเวกเตอร์การกระจัด
เพื่อความชัดเจน ขอให้เราพิจารณาการเคลื่อนที่ของเรือด้วยความเร็ว $υ↖(→)_1$ สัมพันธ์กับแม่น้ำ (กรอบอ้างอิง $K_1$) น้ำที่เคลื่อนที่ด้วยความเร็ว $υ↖(→) $ สัมพันธ์กับฝั่ง (กรอบอ้างอิง $K_2$)

เวกเตอร์การกระจัดของเรือสัมพันธ์กับน้ำ $∆r↖(→)_1$ แม่น้ำสัมพันธ์กับฝั่ง $∆r↖(→)$ และเวกเตอร์การกระจัดรวมของเรือสัมพันธ์กับฝั่ง $∆r↖ (→)_2$ แสดงในรูป..

ในทางคณิตศาสตร์:
$∆r↖(→)_2=∆r↖(→)_1+∆r↖(→)$
เมื่อหารทั้งสองข้างของสมการด้วยช่วงเวลา $∆t$ เราจะได้:
$(∆r↖(→)_2)/(∆t)=(∆r↖(→)_1)/(∆t)+(∆r↖(→))/(∆t)$
ในการประมาณเวกเตอร์ความเร็วบนแกนพิกัด สมการจะมีรูปแบบดังนี้
$υ_(2x)=υ_(1x)+υ_x,$
$υ_(2y)=υ_(1y)+υ_y.$
การคาดคะเนความเร็วจะถูกเพิ่มเข้าไปในพีชคณิต
ความเร็วสัมพัทธ์
จากกฎการบวกความเร็ว จะได้ว่าถ้าวัตถุสองตัวเคลื่อนที่ในกรอบอ้างอิงเดียวกันด้วยความเร็ว $υ↖(→)_1$ และ $υ↖(→)_2$ แล้วความเร็วของวัตถุตัวแรกสัมพันธ์กับวินาทีที่สอง $υ↖(→) _(12)$ เท่ากับความแตกต่างในความเร็วของวัตถุเหล่านี้:
$υ↖(→)_(12)=υ↖(→)_1-υ↖(→)_2$
ดังนั้น เมื่อวัตถุเคลื่อนที่ไปในทิศทางเดียว (แซง) โมดูลความเร็วสัมพัทธ์จะเท่ากับความแตกต่างของความเร็ว และเมื่อเคลื่อนที่ในทิศทางตรงกันข้าม ก็จะเป็นผลรวมของความเร็ว
ความเร่งของจุดวัตถุ
ความเร่งเป็นปริมาณที่แสดงลักษณะอัตราการเปลี่ยนแปลงความเร็ว ตามกฎแล้วการเคลื่อนไหวไม่เท่ากันนั่นคือเกิดขึ้นที่ความเร็วตัวแปร ในบางส่วนของวิถีการเคลื่อนที่ของร่างกาย ความเร็วอาจมากขึ้น ในส่วนอื่น ๆ - น้อยลง ตัวอย่างเช่น รถไฟที่ออกจากสถานีจะเคลื่อนที่เร็วขึ้นเรื่อยๆ เมื่อเวลาผ่านไป เมื่อเข้าใกล้สถานีเขากลับชะลอความเร็วลง
ความเร่ง (หรือการเร่งความเร็วทันที) คือปริมาณทางกายภาพของเวกเตอร์เท่ากับขีดจำกัดของอัตราส่วนของการเปลี่ยนแปลงความเร็วต่อระยะเวลาที่การเปลี่ยนแปลงนี้เกิดขึ้น เนื่องจาก $∆t$ มีแนวโน้มเป็นศูนย์ (นั่นคือ อนุพันธ์ของ $∆t$ υ↖(→)$ เทียบกับ $ t$):
$a↖(→)=lim↙(∆t→0)(∆υ↖(→))/(∆t)=υ↖(→)_t"$
ส่วนประกอบ $a↖(→) (a_x, a_y, a_z)$ มีค่าเท่ากัน ตามลำดับ:
$a_x=υ_x";a_y=υ_y";a_z=υ_z"$
ความเร่งก็เหมือนกับการเปลี่ยนแปลงความเร็ว มุ่งตรงไปที่ความเว้าของวิถีโคจร และสามารถแบ่งออกเป็นสองส่วน - วงสัมผัส- สัมผัสกับวิถีการเคลื่อนที่ - และ ปกติ- ตั้งฉากกับวิถี

ด้วยเหตุนี้ จึงเรียกว่าการฉายภาพความเร่ง $а_х$ ไปยังเส้นสัมผัสของวิถี แทนเจนต์, หรือ วงสัมผัสความเร่ง การฉายภาพ $a_n$ เข้าสู่สภาวะปกติ - ปกติ, หรือ ความเร่งสู่ศูนย์กลาง.
ความเร่งในวงโคจรกำหนดจำนวนการเปลี่ยนแปลงของค่าตัวเลขของความเร็ว:
$a_t=lim↙(∆t→0)(∆υ)/(∆t)$
ความเร่งปกติหรือความเร่งสู่ศูนย์กลางแสดงถึงการเปลี่ยนแปลงทิศทางของความเร็วและถูกกำหนดโดยสูตร:
โดยที่ R คือรัศมีความโค้งของวิถีที่จุดที่สอดคล้องกัน
โมดูลความเร่งถูกกำหนดโดยสูตร:
$a=√(a_t^2+a_n^2)$
ในการเคลื่อนที่เป็นเส้นตรง ความเร่งรวม $a$ จะเท่ากับค่าวงสัมผัส $a=a_t$ เนื่องจากค่าศูนย์กลางศูนย์กลาง $a_n=0$
หน่วย SI ของความเร่งคือความเร่งที่ความเร็วของร่างกายเปลี่ยนแปลง 1 เมตร/วินาทีต่อวินาที หน่วยนี้เขียนแทนด้วย 1 m/s 2 และเรียกว่า “เมตรต่อวินาทีกำลังสอง”
การเคลื่อนที่เชิงเส้นสม่ำเสมอ
การเคลื่อนที่ของจุดจะเรียกว่าสม่ำเสมอหากจุดนั้นเคลื่อนที่เป็นระยะทางเท่ากันในช่วงเวลาที่เท่ากัน
ตัวอย่างเช่น หากรถยนต์เดินทาง 20 กม. ทุกๆ ไตรมาสของชั่วโมง (15 นาที), 40 กม. ทุกๆ ครึ่งชั่วโมง (30 นาที), 80 กม. ทุกๆ ชั่วโมง (60 นาที) เป็นต้น การเคลื่อนไหวดังกล่าวจะถือว่าสม่ำเสมอ ด้วยการเคลื่อนที่สม่ำเสมอ ค่าตัวเลข (โมดูลัส) ของความเร็วของจุด $υ$ จะเป็นค่าคงที่:
$υ=|υ↖(→)|=const$
การเคลื่อนไหวที่สม่ำเสมอสามารถเกิดขึ้นได้ทั้งตามแนวโค้งและแนววิถีเป็นเส้นตรง
กฎการเคลื่อนที่สม่ำเสมอของจุดอธิบายไว้ในสมการ:
โดยที่ $s$ คือระยะทางที่วัดตามแนวโคจรจากจุดใดจุดหนึ่งบนวิถีโคจรที่เป็นจุดเริ่มต้น $t$ - เวลาของจุดระหว่างทาง; $s_0$ - มูลค่า $s$ ในช่วงเวลาเริ่มต้น $t=0$
เส้นทางที่เดินทางในช่วงเวลาหนึ่ง $t$ ถูกกำหนดโดยคำว่า $υt$
การเคลื่อนที่เชิงเส้นสม่ำเสมอ- นี่คือการเคลื่อนไหวที่ร่างกายเคลื่อนที่ด้วยความเร็วคงที่ทั้งขนาดและทิศทาง:
$υ↖(→)=const$
ความเร็วของการเคลื่อนที่เป็นเส้นตรงสม่ำเสมอเป็นค่าคงที่และสามารถกำหนดเป็นอัตราส่วนของการเคลื่อนที่ของจุดต่อระยะเวลาที่เกิดการเคลื่อนไหวนี้:
$υ↖(→)=(∆r↖(→))/(∆t)$
โมดูลของความเร็วนี้
$υ=(|∆r↖(→)|)/(∆t)$
ในความหมาย มันคือระยะทาง $s=|∆r↖(→)|$ ที่จุดนั้นเดินทางในช่วงเวลา $∆t$
ความเร็วของวัตถุในการเคลื่อนที่เป็นเส้นตรงสม่ำเสมอคือปริมาณเท่ากับอัตราส่วนของเส้นทาง $s$ ต่อเวลาที่ครอบคลุมเส้นทางนี้:
การกระจัดระหว่างการเคลื่อนที่เชิงเส้นสม่ำเสมอ (ตามแกน X) สามารถคำนวณได้โดยใช้สูตร:
โดยที่ $υ_x$ คือเส้นโครงของความเร็วบนแกน X ดังนั้น กฎการเคลื่อนที่สม่ำเสมอเป็นเส้นตรงจึงมีรูปแบบดังนี้:
หาก ณ เวลาเริ่มต้น $x_0=0$ แล้ว
กราฟความเร็วเทียบกับเวลาเป็นเส้นตรงขนานกับแกน x และระยะทางที่เดินทางคือพื้นที่ใต้เส้นตรงนี้

กราฟของเส้นทางเทียบกับเวลาเป็นเส้นตรง มุมเอียงของแกนเวลา $Ot$ จะมากกว่า ความเร็วของการเคลื่อนที่สม่ำเสมอก็จะยิ่งมากขึ้นเท่านั้น แทนเจนต์ของมุมนี้เท่ากับความเร็ว
การเคลื่อนไหวเป็นเส้นตรง
เป็นที่ทราบกันดีว่าร่างกายเคลื่อนที่ภายใต้อิทธิพลของแรงที่ใช้กับร่างกาย คุณสามารถทำการทดลองง่ายๆ เพื่อแสดงว่าทิศทางการเคลื่อนที่ของร่างกายจะขึ้นอยู่กับทิศทางของแรงที่กระทำต่อวัตถุนั้นอย่างไร ในการทำเช่นนี้คุณจะต้องมีวัตถุขนาดเล็กตามอำเภอใจ สายยาง และส่วนรองรับแนวนอนหรือแนวตั้ง
ผูกสายไฟที่ปลายด้านหนึ่งเข้ากับส่วนรองรับ ที่ปลายอีกด้านของสายไฟเราแนบวัตถุของเรา ทีนี้ ถ้าเราดึงวัตถุของเราเป็นระยะทางหนึ่งแล้วปล่อยมัน เราจะเห็นว่ามันเริ่มเคลื่อนที่ไปในทิศทางของแนวรับอย่างไร การเคลื่อนที่เกิดจากแรงยืดหยุ่นของเชือก นี่คือวิธีที่โลกดึงดูดวัตถุทั้งหมดบนพื้นผิวของมัน เช่นเดียวกับอุกกาบาตที่บินมาจากอวกาศ
แรงดึงดูดเท่านั้นที่ทำหน้าที่แทนแรงยืดหยุ่น ตอนนี้ ลองใช้ยางยืดรัดวัตถุของเราแล้วดันโดยไม่ดันไปในทิศทางไปทาง/ออกจากแนวรองรับ แต่ดันไปตามทิศทางนั้น หากวัตถุไม่ปลอดภัย มันก็จะบินหนีไป แต่เนื่องจากมันถูกยึดด้วยเชือก ลูกบอลจึงเคลื่อนไปด้านข้าง ยืดเชือกเล็กน้อย ซึ่งดึงกลับ และลูกบอลจะเปลี่ยนทิศทางไปทางแนวรับเล็กน้อย
การเคลื่อนที่เป็นเส้นโค้งเป็นวงกลม
สิ่งนี้เกิดขึ้นทุกช่วงเวลาส่งผลให้ลูกบอลไม่เคลื่อนที่ไปตามวิถีเดิมแต่ยังไม่ตรงไปยังแนวรับด้วย ลูกบอลจะเคลื่อนที่ไปรอบแนวรองรับเป็นวงกลม วิถีการเคลื่อนที่จะเป็นเส้นโค้ง นี่คือวิธีที่ดวงจันทร์เคลื่อนที่รอบโลกโดยไม่ตกลงมาบนโลก
นี่คือวิธีที่แรงโน้มถ่วงของโลกจับอุกกาบาตที่บินเข้ามาใกล้โลก แต่ไม่ได้พุ่งเข้าหาโลกโดยตรง อุกกาบาตเหล่านี้กลายเป็นดาวเทียมของโลก ยิ่งไปกว่านั้น ระยะเวลาที่พวกมันจะอยู่ในวงโคจรนั้นขึ้นอยู่กับว่ามุมการเคลื่อนที่เริ่มต้นของมันสัมพันธ์กับโลกอย่างไร หากการเคลื่อนที่ของพวกมันตั้งฉากกับโลก พวกมันก็สามารถอยู่ในวงโคจรได้อย่างไม่มีกำหนด ถ้ามุมน้อยกว่า 90 องศา พวกมันจะเคลื่อนตัวเป็นเกลียวลดระดับลง และค่อยๆ ตกลงสู่พื้น
การเคลื่อนที่แบบวงกลมด้วยความเร็วโมดูลัสคงที่
ประเด็นที่ควรทราบอีกประการหนึ่งก็คือ ความเร็วของการเคลื่อนที่เชิงโค้งรอบวงกลมนั้นแตกต่างกันไปในทิศทาง แต่มีค่าเท่ากัน และนี่หมายความว่าการเคลื่อนที่ในวงกลมด้วยความเร็วสัมบูรณ์คงที่จะเกิดขึ้นด้วยความเร่งสม่ำเสมอ
เนื่องจากทิศทางการเคลื่อนที่เปลี่ยนไป หมายความว่า การเคลื่อนไหวเกิดขึ้นด้วยความเร่ง และเนื่องจากมีการเปลี่ยนแปลงเท่ากันในแต่ละช่วงเวลา ดังนั้น การเคลื่อนไหวจึงมีความเร่งสม่ำเสมอ และแรงโน้มถ่วงเป็นแรงที่ทำให้เกิดความเร่งคงที่
ดวงจันทร์เคลื่อนที่รอบโลกอย่างแม่นยำด้วยเหตุนี้ แต่ถ้าจู่ๆ การเคลื่อนไหวของดวงจันทร์เปลี่ยนแปลงไป เช่น มีอุกกาบาตขนาดใหญ่มากชนเข้ากับดวงจันทร์ ดวงจันทร์ก็อาจออกจากวงโคจรและตกลงสู่พื้นโลกได้ เราหวังได้เพียงว่าช่วงเวลานี้จะไม่มาถึง ดังนั้นมันไป
https://accounts.google.com
คำอธิบายสไลด์:
คิดแล้วตอบ! 1. การเคลื่อนไหวแบบไหนที่เรียกว่าเครื่องแบบ? 2. ความเร็วของการเคลื่อนที่สม่ำเสมอเรียกว่าอะไร? 3. การเคลื่อนไหวใดเรียกว่ามีความเร่งสม่ำเสมอ? 4. ความเร่งของร่างกายคืออะไร? 5. การกระจัดคืออะไร? วิถีคืออะไร?
หัวข้อบทเรียน: ตรงไปตรงมาและ การเคลื่อนไหวโค้ง. การเคลื่อนไหวของร่างกายเป็นวงกลม
การเคลื่อนที่ทางกล การเคลื่อนที่ตามแนวโค้งเป็นเส้นตรง การเคลื่อนที่ตามแนววงรี การเคลื่อนที่ตามแนวพาราโบลา การเคลื่อนที่ตามแนวไฮเปอร์โบลา การเคลื่อนที่ตามแนววงกลม
วัตถุประสงค์ของบทเรียน: 1. รู้ลักษณะพื้นฐานของการเคลื่อนที่แนวโค้งและความสัมพันธ์ระหว่างสิ่งเหล่านั้น 2. สามารถประยุกต์ความรู้ที่ได้รับเมื่อแก้ไขปัญหาการทดลองได้
แผนการศึกษาหัวข้อ การศึกษาวัสดุใหม่ เงื่อนไขสำหรับการเคลื่อนที่ในแนวตรงและแนวโค้ง ทิศทางของความเร็วของร่างกายระหว่างการเคลื่อนที่แนวโค้ง ความเร่งสู่ศูนย์กลาง ระยะเวลาของการปฏิวัติ ความถี่ของการปฏิวัติ แรงสู่ศูนย์กลาง การปฏิบัติงานทดลองด้านหน้า ทำงานอิสระในรูปแบบของการทดสอบ สรุปผล
ตามประเภทของวิถีการเคลื่อนที่อาจเป็น: Curvilinear Rectilinear
เงื่อนไขการเคลื่อนที่ของลำตัวเป็นเส้นตรงและโค้ง (ทดลองกับลูกบอล)
หน้า 67 จำไว้! ทำงานกับหนังสือเรียน
การเคลื่อนที่แบบวงกลม - กรณีพิเศษการเคลื่อนไหวโค้ง
ดูตัวอย่าง:
ใช้ ดูตัวอย่างการนำเสนอสร้างบัญชีของคุณเอง ( บัญชี) Google และเข้าสู่ระบบ: https://accounts.google.com
คำอธิบายสไลด์:
ลักษณะของการเคลื่อนที่ – ความเร็วเชิงเส้นของการเคลื่อนที่แนวโค้ง () – ความเร่งสู่ศูนย์กลาง () – คาบของการปฏิวัติ () – ความถี่ของการปฏิวัติ ()
จดจำ. ทิศทางการเคลื่อนที่ของอนุภาคเกิดขึ้นพร้อมกับเส้นสัมผัสของวงกลม
ในการเคลื่อนที่แนวโค้งความเร็วของร่างกายจะพุ่งตรงไปยังวงกลมในแนวสัมผัส จำไว้
ในระหว่างการเคลื่อนที่แนวโค้ง ความเร่งจะมุ่งตรงไปยังศูนย์กลางของวงกลม จำไว้
เหตุใดความเร่งจึงพุ่งเข้าหาศูนย์กลางของวงกลม?
การหาความเร็ว - ความเร็ว - คาบการหมุน r - รัศมีของวงกลม
เมื่อวัตถุเคลื่อนที่เป็นวงกลม ขนาดของเวกเตอร์ความเร็วสามารถเปลี่ยนแปลงหรือคงที่ได้ แต่ทิศทางของเวกเตอร์ความเร็วจำเป็นต้องเปลี่ยนแปลง ดังนั้นเวกเตอร์ความเร็วจึงเป็นปริมาณที่แปรผันได้ ซึ่งหมายความว่าการเคลื่อนที่ในวงกลมจะเกิดขึ้นด้วยความเร่งเสมอ จดจำ!
ดูตัวอย่าง:
หัวข้อ: การเคลื่อนที่เป็นเส้นตรงและโค้ง การเคลื่อนไหวของร่างกายเป็นวงกลม
เป้าหมาย: ศึกษาลักษณะของการเคลื่อนที่แนวโค้ง และโดยเฉพาะการเคลื่อนที่แบบวงกลม
แนะนำแนวคิดเรื่องความเร่งสู่ศูนย์กลางและแรงสู่ศูนย์กลาง
พัฒนาความสามารถที่สำคัญของนักเรียนต่อไป: ความสามารถในการเปรียบเทียบ วิเคราะห์ สรุปผลจากการสังเกต สรุปข้อมูลการทดลองตามความรู้ที่มีอยู่เกี่ยวกับการเคลื่อนไหวของร่างกาย พัฒนาความสามารถในการใช้แนวคิดพื้นฐาน สูตร และกฎทางกายภาพของการเคลื่อนไหวของร่างกายเมื่อเคลื่อนไหว วงกลม.
ส่งเสริมความเป็นอิสระ สอนให้เด็กๆ ร่วมมือกัน ปลูกฝังการเคารพความคิดเห็นของผู้อื่น ปลุกความอยากรู้อยากเห็นและการสังเกต
อุปกรณ์การเรียน:คอมพิวเตอร์ เครื่องฉายมัลติมีเดีย หน้าจอ บอลบนยางยืด บอลบนสาย ไม้บรรทัด เครื่องเมตรอนอม ลูกข่าง
อุปกรณ์ตกแต่ง: “เรามีอิสระอย่างแท้จริงเมื่อเรารักษาความสามารถในการให้เหตุผลกับตนเองได้”ซีเซโรเน.
ประเภทบทเรียน: บทเรียนการเรียนรู้เนื้อหาใหม่
ระหว่างเรียน:
เวลาจัดงาน:
คำชี้แจงปัญหา: เราได้ศึกษาการเคลื่อนไหวประเภทใด
(คำตอบ: มีความสม่ำเสมอสม่ำเสมอ เป็นเส้นตรงมีความเร่งสม่ำเสมอ)
แผนการเรียน:
- อัปเดต ความรู้พื้นฐาน (อบอุ่นร่างกาย) (5 นาที)
- การเคลื่อนไหวแบบไหนที่เรียกว่าเครื่องแบบ?
- ความเร็วของการเคลื่อนที่สม่ำเสมอเรียกว่าอะไร?
- การเคลื่อนที่แบบใดเรียกว่าความเร่งสม่ำเสมอ?
- ความเร่งของร่างกายคืออะไร?
- การเคลื่อนไหวคืออะไร? วิถีคืออะไร?
- ส่วนสำคัญ. การเรียนรู้เนื้อหาใหม่ (11 นาที)
- การกำหนดปัญหา:
การมอบหมายงานให้กับนักเรียน:ลองพิจารณาการหมุนของลูกข่าง การหมุนของลูกบอลบนเชือก (สาธิตประสบการณ์) คุณจะอธิบายลักษณะการเคลื่อนไหวของพวกเขาได้อย่างไร? การเคลื่อนไหวของพวกเขามีอะไรเหมือนกัน?
ครู: ซึ่งหมายความว่างานของเราในบทเรียนวันนี้คือการแนะนำแนวคิดของการเคลื่อนที่ในแนวตรงและแนวโค้ง การเคลื่อนไหวร่างกายเป็นวงกลม
(บันทึกหัวข้อบทเรียนลงในสมุดบันทึก)
- หัวข้อบทเรียน
สไลด์หมายเลข 2
ครู: ในการกำหนดเป้าหมาย ฉันแนะนำให้วิเคราะห์รูปแบบการเคลื่อนที่ของกลไก(ประเภทของการเคลื่อนไหวลักษณะทางวิทยาศาสตร์)
สไลด์หมายเลข 3
- เราจะตั้งเป้าหมายอะไรสำหรับหัวข้อของเรา?
สไลด์หมายเลข 4
- ผมแนะนำให้ศึกษาหัวข้อนี้ดังนี้วางแผน (เลือกหลัก)
คุณเห็นด้วยหรือไม่?
สไลด์หมายเลข 5
- ลองดูที่ภาพ ลองพิจารณาตัวอย่างประเภทของวิถีที่พบในธรรมชาติและเทคโนโลยี
สไลด์หมายเลข 6
- การกระทำของแรงต่อร่างกายในบางกรณีสามารถนำไปสู่การเปลี่ยนแปลงขนาดของเวกเตอร์ความเร็วของร่างกายนี้เท่านั้นและในกรณีอื่น ๆ - ไปสู่การเปลี่ยนแปลงทิศทางของความเร็ว เรามาแสดงการทดลองนี้กัน
(ทำการทดลองกับลูกบอลบนแถบยางยืด)
สไลด์หมายเลข 7
- วาดข้อสรุป อะไรเป็นตัวกำหนดประเภทของวิถีการเคลื่อนที่?
(คำตอบ)
ทีนี้ลองเปรียบเทียบกัน คำจำกัดความนี้กับอันที่ให้ไว้ในหนังสือเรียนของคุณในหน้า 67
สไลด์หมายเลข 8
- มาดูภาพวาดกัน การเคลื่อนที่แนวโค้งสัมพันธ์กับการเคลื่อนที่แบบวงกลมได้อย่างไร
(คำตอบ)
นั่นคือเส้นโค้งสามารถจัดเรียงใหม่ในรูปแบบของชุดส่วนโค้งวงกลมที่มีเส้นผ่านศูนย์กลางต่างกัน
เอาเป็นว่า:...
(เขียนลงในสมุดบันทึก)
สไลด์หมายเลข 9
- ลองพิจารณาว่าอันไหน ปริมาณทางกายภาพกำหนดลักษณะการเคลื่อนไหวเป็นวงกลม
สไลด์หมายเลข 10
- มาดูตัวอย่างการเคลื่อนย้ายรถกัน อะไรบินออกมาจากใต้ล้อ? มันเคลื่อนไหวอย่างไร? อนุภาคมีทิศทางอย่างไร? คุณจะป้องกันตัวเองจากอนุภาคเหล่านี้ได้อย่างไร?
(คำตอบ)
เอาล่ะสรุป : ...(เกี่ยวกับธรรมชาติของการเคลื่อนที่ของอนุภาค)
สไลด์หมายเลข 11
- ลองดูทิศทางของความเร็วเมื่อวัตถุเคลื่อนที่เป็นวงกลม (แอนิเมชั่นกับม้า)
เอาล่ะสรุป: ...( ความเร็วถูกกำหนดทิศทางอย่างไร)
สไลด์หมายเลข 12
- เรามาดูกันว่าความเร่งถูกกำหนดทิศทางอย่างไรระหว่างการเคลื่อนที่แนวโค้ง ซึ่งปรากฏที่นี่เนื่องจากความเร็วเปลี่ยนทิศทาง
(แอนิเมชั่นกับนักขี่มอเตอร์ไซค์)
เอาล่ะสรุป: ...( ทิศทางของการเร่งความเร็วคืออะไร?
มาเขียนมันลงไปกันดีกว่า สูตรในสมุดบันทึก
สไลด์หมายเลข 13
- ดูภาพวาดสิ ตอนนี้เรามาดูกันว่าเหตุใดความเร่งจึงพุ่งเข้าหาศูนย์กลางของวงกลม
(คำอธิบายของครู)
สไลด์หมายเลข 14
ข้อสรุปใดที่สามารถสรุปได้เกี่ยวกับทิศทางของความเร็วและความเร่ง?
- มีลักษณะอื่นของการเคลื่อนที่แบบโค้ง ซึ่งรวมถึงระยะเวลาและความถี่ของการหมุนของร่างกายเป็นวงกลม ความเร็วและระยะเวลาสัมพันธ์กันด้วยความสัมพันธ์ที่เราจะสร้างทางคณิตศาสตร์:
(ครูเขียนบนกระดาน นักเรียนเขียนในสมุดบันทึก)
เป็นที่ทราบกันดีและมีวิธีนั้นแล้ว
ตั้งแต่นั้นเป็นต้นมา
สไลด์หมายเลข 15
- ข้อสรุปทั่วไปที่สามารถสรุปได้เกี่ยวกับธรรมชาติของการเคลื่อนที่แบบวงกลมคืออะไร?
(คำตอบ)
สไลด์หมายเลข 16. ,
- ตามกฎข้อที่ 2 ของนิวตัน ความเร่งจะกำกับร่วมกับแรงที่ก่อให้เกิดความเร่งเสมอ สิ่งนี้ก็เกิดขึ้นจริงสำหรับการเร่งความเร็วสู่ศูนย์กลางเช่นกัน
เอาล่ะสรุป : แรงพุ่งไปที่แต่ละจุดของวิถีอย่างไร?
(คำตอบ)
แรงนี้เรียกว่าแรงสู่ศูนย์กลาง
มาเขียนมันลงไปกันดีกว่า สูตรในสมุดบันทึก
(ครูเขียนบนกระดาน นักเรียนเขียนในสมุดบันทึก)
แรงสู่ศูนย์กลางถูกสร้างขึ้นโดยพลังแห่งธรรมชาติทั้งหมด
ยกตัวอย่างการกระทำของแรงสู่ศูนย์กลางโดยธรรมชาติ:
- แรงยืดหยุ่น (หินบนเชือก);
- แรงโน้มถ่วง (ดาวเคราะห์รอบดวงอาทิตย์);
- แรงเสียดทาน (การเคลื่อนที่แบบหมุน)
สไลด์หมายเลข 17
- เพื่อรวมสิ่งนี้เข้าด้วยกัน ฉันขอแนะนำให้ทำการทดลอง ในการดำเนินการนี้ เราจะสร้างกลุ่มขึ้นมาสามกลุ่ม
กลุ่มที่ 1 จะสร้างการพึ่งพาความเร็วกับรัศมีของวงกลม
กลุ่มที่ 2 จะวัดความเร่งเมื่อเคลื่อนที่เป็นวงกลม
กลุ่มที่ 3 จะสร้างการพึ่งพาความเร่งสู่ศูนย์กลางกับจำนวนรอบต่อหน่วยเวลา
สไลด์หมายเลข 18
สรุป. ความเร็วและความเร่งขึ้นอยู่กับรัศมีของวงกลมอย่างไร
- เราจะทำการทดสอบการรวมบัญชีครั้งแรก (7 นาที)
สไลด์หมายเลข 19
- ประเมินงานของคุณในชั้นเรียน ดำเนินประโยคต่อบนแผ่นกระดาษ
(สะท้อนกลับ นักเรียนเปล่งเสียงคำตอบของแต่ละคนออกมาดังๆ)
สไลด์หมายเลข 20
- การบ้าน: §18-19,
อดีต. 18 (1, 2)
ตัวอย่างเพิ่มเติม 18 (5)
(ความเห็นของอาจารย์)
สไลด์หมายเลข 21
ขึ้นอยู่กับรูปร่างของวิถีการเคลื่อนที่สามารถแบ่งออกเป็นเส้นตรงและเส้นโค้ง บ่อยครั้งที่คุณพบกับการเคลื่อนไหวโค้งเมื่อวิถีถูกแสดงเป็นเส้นโค้ง ตัวอย่างของการเคลื่อนไหวประเภทนี้คือ เส้นทางของร่างกายที่ถูกเหวี่ยงไปในมุมหนึ่งจนถึงขอบฟ้า การเคลื่อนที่ของโลกรอบดวงอาทิตย์ ดาวเคราะห์ และอื่นๆ
ภาพที่ 1 วิถีและการเคลื่อนไหวในการเคลื่อนที่แบบโค้ง
คำจำกัดความ 1การเคลื่อนไหวแบบโค้งเรียกว่าการเคลื่อนไหวที่มีวิถีโคจรเป็นเส้นโค้ง หากวัตถุเคลื่อนที่ไปตามเส้นทางโค้ง เวกเตอร์การกระจัด s → จะถูกกำกับไปตามคอร์ด ดังแสดงในรูปที่ 1 และ l คือความยาวของเส้นทาง ทิศทางของความเร็วชั่วขณะของร่างกายเคลื่อนที่ไปตามเส้นสัมผัสที่จุดเดียวกันกับวิถีซึ่งวัตถุที่กำลังเคลื่อนที่อยู่ในปัจจุบัน ดังแสดงในรูปที่ 2

รูปที่ 2. ความเร็วขณะเคลื่อนที่ขณะโค้ง
คำจำกัดความ 2
การเคลื่อนที่แนวโค้งของจุดวัสดุเรียกว่าสม่ำเสมอเมื่อโมดูลความเร็วคงที่ (การเคลื่อนที่แบบวงกลม) และมีความเร่งสม่ำเสมอเมื่อโมดูลทิศทางและความเร็วมีการเปลี่ยนแปลง (การเคลื่อนไหวของวัตถุที่ถูกโยน)
การเคลื่อนที่แนวโค้งจะมีความเร่งอยู่เสมอ สิ่งนี้อธิบายได้จากข้อเท็จจริงที่ว่าถึงแม้จะมีโมดูลความเร็วไม่เปลี่ยนแปลงและทิศทางที่เปลี่ยนไป ความเร่งก็ยังปรากฏอยู่เสมอ
เพื่อศึกษาการเคลื่อนที่เชิงโค้งของจุดวัสดุ จะมีการใช้วิธีการสองวิธี
เส้นทางแบ่งออกเป็นส่วนต่าง ๆ โดยแต่ละส่วนสามารถพิจารณาเป็นทางตรงได้ ดังแสดงในรูปที่ 3
รูปที่ 3. การแบ่งการเคลื่อนไหวแบบโค้งออกเป็นแบบแปลน
ตอนนี้กฎการเคลื่อนที่เป็นเส้นตรงสามารถนำไปใช้กับแต่ละส่วนได้ หลักการนี้ได้รับอนุญาต
วิธีการแก้ปัญหาที่สะดวกที่สุดถือเป็นการแสดงเส้นทางเป็นชุดของการเคลื่อนไหวต่างๆ ตามแนวโค้งวงกลม ดังแสดงในรูปที่ 4 จำนวนพาร์ติชั่นจะน้อยกว่าวิธีก่อนหน้ามาก นอกจากนี้การเคลื่อนที่ตามแนววงกลมนั้นเป็นเส้นโค้งอยู่แล้ว

รูปที่ 4. การแบ่งการเคลื่อนที่ตามแนวโค้งให้เป็นการเคลื่อนที่ตามแนวโค้งวงกลม
หมายเหตุ 1
หากต้องการบันทึกการเคลื่อนไหวส่วนโค้ง คุณต้องสามารถอธิบายการเคลื่อนไหวในวงกลมได้ และแสดงการเคลื่อนไหวตามอำเภอใจในรูปแบบของชุดการเคลื่อนไหวตามแนวส่วนโค้งของวงกลมเหล่านี้
การศึกษาการเคลื่อนที่แนวโค้งประกอบด้วยการรวบรวมสมการจลนศาสตร์ที่อธิบายการเคลื่อนที่นี้ และช่วยให้สามารถกำหนดคุณลักษณะทั้งหมดของการเคลื่อนที่ตามเงื่อนไขเริ่มต้นที่มีอยู่
ตัวอย่างที่ 1
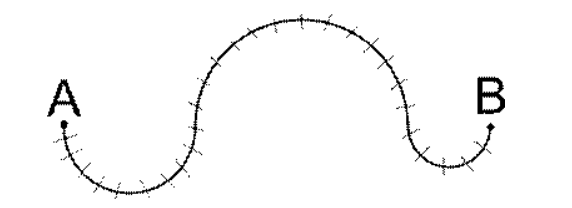
เมื่อพิจารณาจากจุดวัสดุที่เคลื่อนที่ไปตามเส้นโค้ง ดังแสดงในรูปที่ 4 จุดศูนย์กลางของวงกลม O 1, O 2, O 3 อยู่บนเส้นตรงเดียวกัน จำเป็นต้องค้นหาการกระจัด
s → และความยาวเส้นทาง l ขณะเคลื่อนที่จากจุด A ไปยัง B
สารละลาย
โดยเงื่อนไข เราจะได้ว่าจุดศูนย์กลางของวงกลมอยู่ในเส้นตรงเดียวกัน ดังนั้น:
วินาที → = ร 1 + 2 ร 2 + ร 3 .
เนื่องจากวิถีการเคลื่อนที่เป็นผลรวมของครึ่งวงกลม ดังนั้น:
ล. ~ AB = π ร 1 + ร 2 + ร 3 .
คำตอบ: s → = R 1 + 2 R 2 + R 3, l ~ A B = π R 1 + R 2 + R 3
ตัวอย่างที่ 2
การขึ้นอยู่กับระยะทางที่ร่างกายเดินทางตรงเวลาแสดงด้วยสมการ s (t) = A + B t + C t 2 + D เสื้อ 3 (C = 0.1 m / s 2, D = 0.003 m / s 3). คำนวณหลังจากช่วงเวลาใดหลังจากเริ่มเคลื่อนไหวความเร่งของร่างกายจะเท่ากับ 2 m / s 2
สารละลาย

คำตอบ: t = 60 วิ
หากคุณสังเกตเห็นข้อผิดพลาดในข้อความ โปรดไฮไลต์แล้วกด Ctrl+Enter
เรารู้ว่าร่างกายทุกส่วนดึงดูดกัน โดยเฉพาะดวงจันทร์ถูกดึงดูดมายังโลก แต่คำถามก็เกิดขึ้น: ถ้าดวงจันทร์ถูกดึงดูดมายังโลก ทำไมมันถึงหมุนรอบมันแทนที่จะตกลงมายังโลก?
ในการตอบคำถามนี้ จำเป็นต้องพิจารณาประเภทของการเคลื่อนไหวของร่างกายด้วย เรารู้อยู่แล้วว่าการเคลื่อนไหวสามารถสม่ำเสมอและไม่สม่ำเสมอได้ แต่ยังมีลักษณะอื่นของการเคลื่อนไหวอีกด้วย โดยเฉพาะอย่างยิ่งขึ้นอยู่กับทิศทางการเคลื่อนที่ของเส้นตรงและเส้นโค้งจะแตกต่างกัน
การเคลื่อนไหวเป็นเส้นตรง
เป็นที่ทราบกันดีว่าร่างกายเคลื่อนที่ภายใต้อิทธิพลของแรงที่ใช้กับร่างกาย คุณสามารถทำการทดลองง่ายๆ เพื่อแสดงว่าทิศทางการเคลื่อนที่ของร่างกายจะขึ้นอยู่กับทิศทางของแรงที่กระทำต่อวัตถุนั้นอย่างไร ในการทำเช่นนี้คุณจะต้องมีวัตถุขนาดเล็กตามอำเภอใจ สายยาง และส่วนรองรับแนวนอนหรือแนวตั้ง
ผูกสายไฟที่ปลายด้านหนึ่งเข้ากับส่วนรองรับ ที่ปลายอีกด้านของสายไฟเราแนบวัตถุของเรา ทีนี้ ถ้าเราดึงวัตถุของเราเป็นระยะทางหนึ่งแล้วปล่อยมัน เราจะเห็นว่ามันเริ่มเคลื่อนที่ไปในทิศทางของแนวรับอย่างไร การเคลื่อนที่เกิดจากแรงยืดหยุ่นของเชือก นี่คือวิธีที่โลกดึงดูดวัตถุทั้งหมดบนพื้นผิวของมัน เช่นเดียวกับอุกกาบาตที่บินมาจากอวกาศ
แรงดึงดูดเท่านั้นที่ทำหน้าที่แทนแรงยืดหยุ่น ตอนนี้ ลองใช้ยางยืดรัดวัตถุของเราแล้วดันโดยไม่ดันไปในทิศทางไปทาง/ออกจากแนวรองรับ แต่ดันไปตามทิศทางนั้น หากวัตถุไม่ปลอดภัย มันก็จะบินหนีไป แต่เนื่องจากมันถูกยึดด้วยเชือก ลูกบอลจึงเคลื่อนไปด้านข้าง ยืดเชือกเล็กน้อย ซึ่งดึงกลับ และลูกบอลจะเปลี่ยนทิศทางไปทางแนวรับเล็กน้อย
การเคลื่อนที่เป็นเส้นโค้งเป็นวงกลม
สิ่งนี้เกิดขึ้นทุกช่วงเวลาส่งผลให้ลูกบอลไม่เคลื่อนที่ไปตามวิถีเดิมแต่ยังไม่ตรงไปยังแนวรับด้วย ลูกบอลจะเคลื่อนที่ไปรอบแนวรองรับเป็นวงกลม วิถีการเคลื่อนที่จะเป็นเส้นโค้ง นี่คือวิธีที่ดวงจันทร์เคลื่อนที่รอบโลกโดยไม่ตกลงมาบนโลก
นี่คือวิธีที่แรงโน้มถ่วงของโลกจับอุกกาบาตที่บินเข้ามาใกล้โลก แต่ไม่ได้พุ่งเข้าหาโลกโดยตรง อุกกาบาตเหล่านี้กลายเป็นดาวเทียมของโลก ยิ่งไปกว่านั้น ระยะเวลาที่พวกมันจะอยู่ในวงโคจรนั้นขึ้นอยู่กับว่ามุมการเคลื่อนที่เริ่มต้นของมันสัมพันธ์กับโลกอย่างไร หากการเคลื่อนที่ของพวกมันตั้งฉากกับโลก พวกมันก็สามารถอยู่ในวงโคจรได้อย่างไม่มีกำหนด ถ้ามุมน้อยกว่า 90 องศา พวกมันจะเคลื่อนตัวเป็นเกลียวลดระดับลง และค่อยๆ ตกลงสู่พื้น
การเคลื่อนที่แบบวงกลมด้วยความเร็วโมดูลัสคงที่
ประเด็นที่ควรทราบอีกประการหนึ่งก็คือ ความเร็วของการเคลื่อนที่เชิงโค้งรอบวงกลมนั้นแตกต่างกันไปในทิศทาง แต่มีค่าเท่ากัน และนี่หมายความว่าการเคลื่อนที่ในวงกลมด้วยความเร็วสัมบูรณ์คงที่จะเกิดขึ้นด้วยความเร่งสม่ำเสมอ
เนื่องจากทิศทางการเคลื่อนที่เปลี่ยนไป หมายความว่า การเคลื่อนไหวเกิดขึ้นด้วยความเร่ง และเนื่องจากมีการเปลี่ยนแปลงเท่ากันในแต่ละช่วงเวลา ดังนั้น การเคลื่อนไหวจึงมีความเร่งสม่ำเสมอ และแรงโน้มถ่วงเป็นแรงที่ทำให้เกิดความเร่งคงที่
ดวงจันทร์เคลื่อนที่รอบโลกอย่างแม่นยำด้วยเหตุนี้ แต่ถ้าจู่ๆ การเคลื่อนไหวของดวงจันทร์เปลี่ยนแปลงไป เช่น มีอุกกาบาตขนาดใหญ่มากชนเข้ากับดวงจันทร์ ดวงจันทร์ก็อาจออกจากวงโคจรและตกลงสู่พื้นโลกได้ เราหวังได้เพียงว่าช่วงเวลานี้จะไม่มาถึง ดังนั้นมันไป


